参考画像:NC State: Microbot and Micro-Origami|YouTubeスクリーンショット
■「Microbot Origami」|単一細胞をつかんで輸送することができる超小型ロボットを開発|米ノースカロライナ州立大学・デューク大学
Microbot Origami Can Capture, Transport Single Cells
(2017/8/4、NC STATE University)
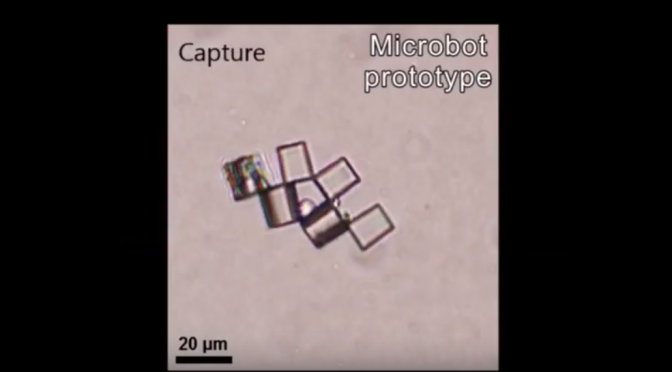
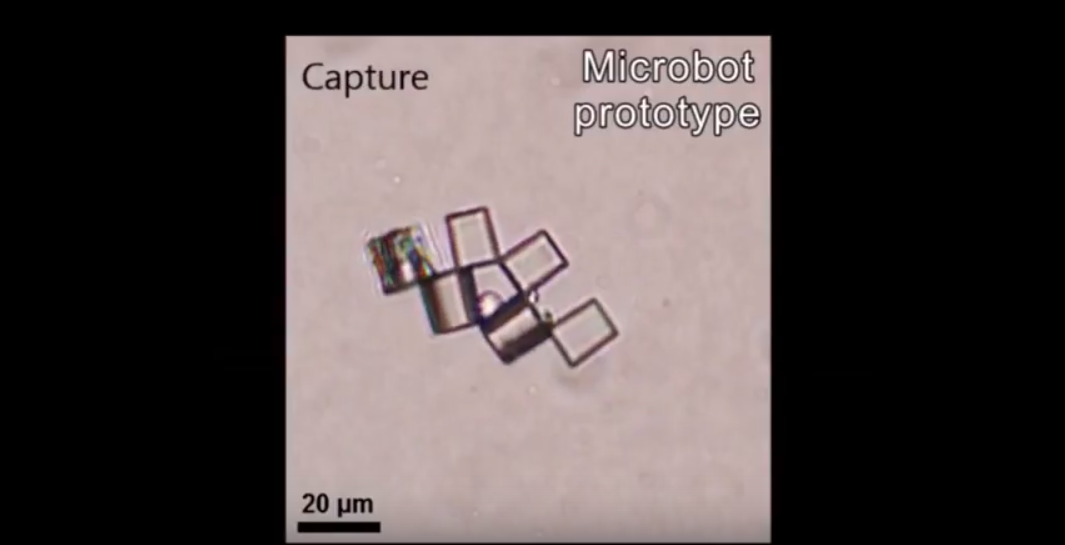
Researchers at North Carolina State University and Duke University have developed a way to assemble and pre-program tiny structures made from microscopic cubes – “microbot origami” – to change their shape when actuated by a magnetic field and then, using the magnetic energy from their environment, perform a variety of tasks – including capturing and transporting single cells.
米ノースカロライナ州立大学とデューク大学の研究者は、微小なポリマー性のキューブから作られたマイクロボット「Microbot Origami」が磁場を作動させたときに形状を変えるよう、あらかじめプログラムする方法を開発しました。
この「Microbot Origami」は、単一細胞の捕獲および輸送を含む様々なタスクを実行します。
NC State: Microbot and Micro-Origami
これまでにも折り紙からインスピレーションを受けたロボットや血液の中を泳ぐ小さな医療用ロボットについていくつか取り上げてきました。
【関連記事】
- Robot Origami |折り紙からインスピレーションを受けて作られた小さな医療用ロボットが開発
- 胃の中のボタン電池などを磁力で捕まえる「飲み込めるロボット」を開発|MITと東工大ら
- 血液の中を泳いで薬を届ける「3Dプリント魚」が開発される|カリフォルニア大学サンディエゴ校
“Previously reported microrobotic structures have been limited to performing simple tasks such as pushing and penetrating objects due to their rigid bodies. The ability to remotely control the dynamic reconfiguration of our microbot creates a new ‘toolbox’ for manipulating microscale objects and interacting with its microenvironment,” said Koohee Han, a Ph.D. candidate at NC State and first author of the paper.
これまでのマイクロロボットは素材の性質上、押し込んで貫通させるというような単純な作業を行なうことに限られていましたが、今回のマイクロボットは磁場を通したエネルギーを使って形を変えることにより、多くのタスクを実行することができる点が異なっています。
■まとめ
これまでにも超小型の医療用ロボットに関するアイデアを取り上げてきましたが、多機能型のロボットが開発されたことにより、また一つ進んだような感じがしますね。
【参考リンク】
- Koohee Han, C. Wyatt Shields IV, Nidhi M. Diwakar, Bhuvnesh Bharti, Gabriel P. López, Orlin D. Velev. Sequence-encoded colloidal origami and microbot assemblies from patchy magnetic cubes. Science Advances 04 Aug 2017:Vol. 3, no. 8, e1701108 DOI: 10.1126/sciadv.1701108
【関連記事】