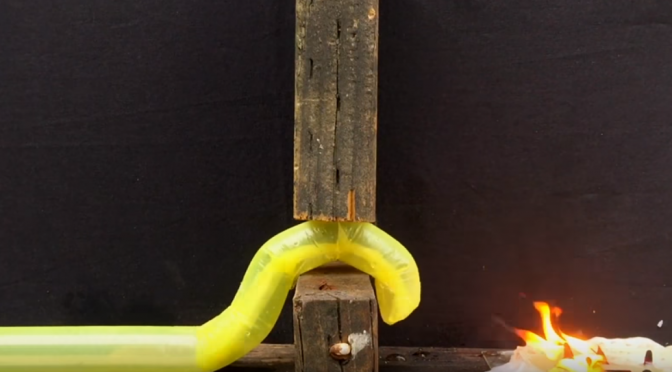
参考画像:Stanford researchers develop vine-like, growing robot|YouTubeスクリーンショット
■スタンフォード大の「やわらかい空気圧ロボット」から浮かんだ疑問「そもそもロボットの定義とは?」
Stanford researchers develop vine-like, growing robot
【参考リンク】
- Elliot W. Hawkes, Laura H. Blumenschein, Joseph D. Greer and Allison M. Okamura. A soft robot that navigates its environment through growth. Science Robotics 19 Jul 2017: Vol. 2, Issue 8, eaan3028 DOI: 10.1126/scirobotics.aan3028
「バルーン型ロボット」についての詳細は元記事や動画、論文をチェックしてほしいのですが、気になったのは、そもそもロボットの定義って何だろうということです。
ロボットといえば、素材は硬いもので、カクカクした動きをするものというような勝手な想像をしていて、今回紹介されている「バルーン型ロボット?」というところに疑問を持ち、そもそもロボットってどういうものを指すのだろうという疑問を持ちました。
そこで、ロボットの定義について検索してみました。
ロボットの定義とパートナーロボット|平成27年版 情報通信白書|総務省
国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「NEDOロボット白書2014」(2014年3月)では、ロボットを「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」と定義している。
なお、政府「ロボット新戦略」(平成27年1月23日)では、「今後、クラウド化の進展によるネットワーク基盤の充実、多種多様な機器等へのセンサーが設置され、膨大なデジタル情報が収集・分析できるIoT社会の到来によって、ロボットは固有の制御系を持たなくとも「知能・制御系のみによって、社会の多様な場面で、多様なロボット機能が提供できるようになる可能性もある。そうなれば、3要素の全てを兼ね備えた機会のみをロボットと定義することでは、実態を捉えきれなくなる可能性がある」とも指摘している。
ロボットの定義とは新エネルギー・産業技術総合開発機構(NEDO)によれば「センサー、知能・制御系、駆動系の3つの要素技術を有する、知能化した機械システム」としているものの、3要素全てを兼ね備えたものだけをロボットと定義すると実態をとらえきれなくなる可能性があると注釈がついており、結局のところ、ロボットの定義とはこれであるというはっきりとしたものはまだ確定していない、ふわっとした印象を受けます。
そこで、先ほどの「バルーン型ロボット」に戻ります。
A soft robot that navigates its environment through growth.
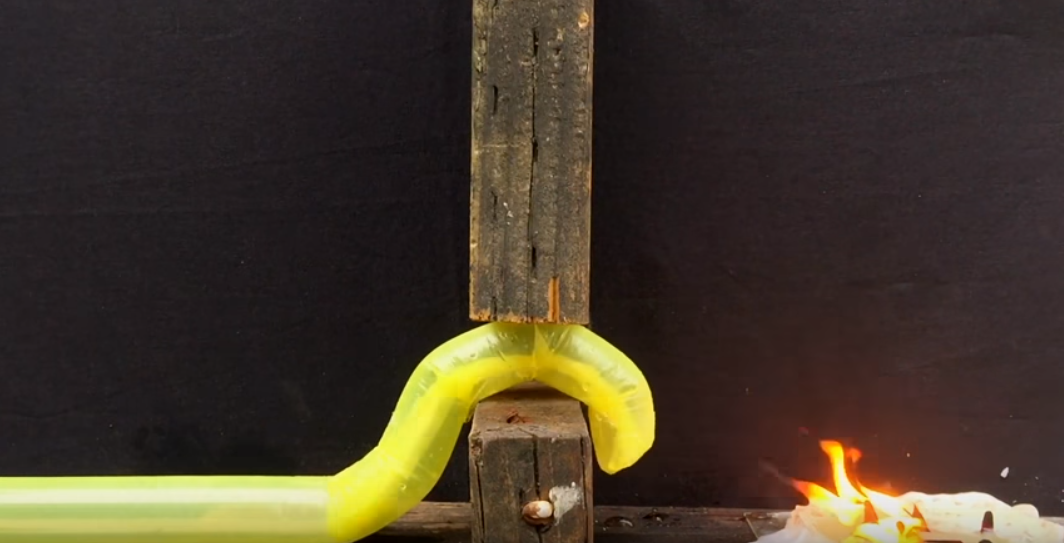
We report a class of soft pneumatic robot that is capable of a basic form of this behavior, growing substantially in length from the tip while actively controlling direction using onboard sensing of environmental stimuli; further, the peak rate of lengthening is comparable to rates of animal and robot locomotion.
このやわらかい空気圧ロボットは、植物や菌類、ニューロンなど成長(伸びる)ことにより動くことができるように、先端から長さを伸ばすことにより移動し、内蔵された環境刺激に対するセンサーで方向を能動的に制御され、その延長のピーク速度は、動物やロボットの移動速度に匹敵するものです。
つまり、先程のロボットの定義の3つの要素を兼ね備えていて、自身のロボットに対する固定観念があったことを気づかされました。
※ロボットといえば鋼鉄の素材でというのはあまりにも偏った固定観念であり、アニメの世界では「ドラえもん」があるように柔らかそうな素材のロボットもいることを後から思い出し、自分自身の中に、ロボットってアニメと現実では別物というように考えていたのかもしれません。
このバルーン型ロボットはどういう場面で役立つことが考えられるのでしょうか?
これはヤバイ。スタンフォード大学のバルーンロボットが可能性が無限大すぎて絶句(動画あり)
(2017/7/26、GIZMODE)
これなら人や車輪式のロボット、ドローンが入れない床下や入り組んだ配管スペースなどにも入って中を確認することができます。災害時に生存者を探すのにも役立ちそうです。
このバルーン型ロボットを使えば、狭いところに潜り込んで空気圧によって重いものを持ち上げる救助やドローンでは飛ぶことができない床下や配管内での活躍が期待できます。
もしかすると、医療の世界にも応用されて、例えば、胃カメラや大腸内視鏡がバルーン型ロボットになって自動で悪いところを検知するようになったり、カテーテルがバルーン型ロボットとなって治療に使われるようになるかもしれません。
【追記(2017/10/9)】
また、食べられる素材でできた空気圧式アクチュエータも開発されているようです。
Soft Pneumatic Gelatin Actuator for Edible Robotics
An Edible Actuator for Ingestible Robots
(2017/10/5、IEEE Spectrum)
The components of such edible robots could be mixed with nutrient or pharmaceutical components for digestion and metabolization. Potential applications are disposable robots for exploration, digestible robots for medical purposes in humans and animals, and food transportation where the robot does not require additional payload because the robot is the food.
ゼラチン、グリセリン、および水の混合物から作られた空気圧式アクチュエータは、野生動物の行動観察のためのロボットや探索のための使い捨てができるロボット等への活用が期待されます。
■まとめ
このバルーン型ロボットで学んだことは〇〇は××でなければならないという固定観念がいかに発想を邪魔してしまうかということです。
本当はこうしたほうがいいとはわかっていても、自分自身の中にそうした固定観念に縛られていて発想を封じ込めてしまっているということがあるのではないでしょうか?
そんなときにあなたにとっての「バルーン型ロボット」を持っておけば、狭くなった発想を広げてくれるかもしれません。
【関連記事】
- NTTドコモ、「ロボットプログラマー」職業体験ができるパビリオンオープン|#キッザニア
- 「AI(人工知能)・ロボット・テクノロジーは人間から仕事を奪うのか?」という問いからは人間と機械が一体化するという考え方が抜け落ちている!
- 人間と #ロボット の違いとは?|#羽田圭介 さんのコメントから考えたこと|#ワイドナショー
- バーテンダーロボットによってバーテンダーの仕事はなくなってしまう?
- ロボット×プログラミング×遊び=トイ・プラットフォームtoio(sonyのおもちゃ) #stem #steam #education
- #Sony ロボット・プログラミング学習ができるSTEM教育キットKOOV|「Tinkering(ティンカリング)」とデザイン力を育てる
- DFRobot’s BOSON Kit|モジュール化したロボットキットがコーディング・IoTなど子供のSTEM教育に役立つ
- Robot Origami |折り紙からインスピレーションを受けて作られた小さな医療用ロボットが開発
- 認知症の改善効果が期待されるコミュニケーション用ロボット「テレノイド」が宮城県の介護施設に導入
- 胃の中のボタン電池などを磁力で捕まえる「飲み込めるロボット」を開発|MITと東工大ら
- PillPack|ロボットが薬をパックし、薬剤師はより多くの時間を顧客の対応にあてられる
- 遠隔操作の手術ロボットによる網膜の手術に世界で初めて成功|オックスフォード大学