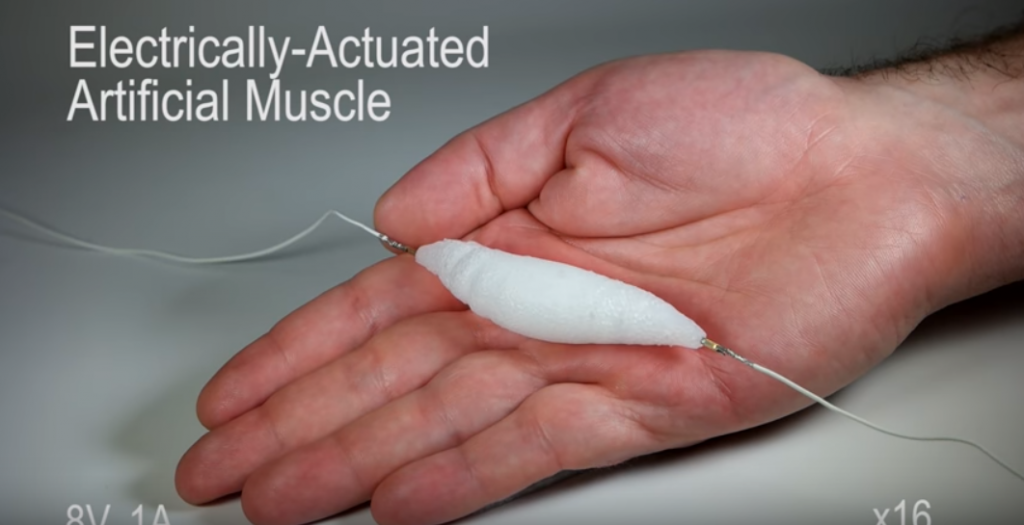
The new material has a strain density (expansion per gram) that is 15 times larger than natural muscle, and can lift 1000 times its own weight.
<中略>
It was tested in a variety of robotic applications where it showed significant expansion-contraction ability, being capable of expansion up to 900% when electrically heated to 80°C.
Unlike rigid robots, soft robots can replicate natural motion—grasping and manipulation—to provide medical and other types of assistance, perform delicate tasks, or pick up soft objects.
Now, MIT researchers have come up with one of the simplest and lowest-cost systems yet for developing such “muscles,” in which a material reproduces some of the bending motions that natural muscle tissues perform.
The key ingredient, cheap and ubiquitous, is ordinary nylon fiber.
<中略>
Spinks adds, “Bending-type actuators are needed for robotic grippers, microscopic tools, and various machine components. These new bending actuators could have immediate application.”
The components of such edible robots could be mixed with nutrient or pharmaceutical components for digestion and metabolization. Potential applications are disposable robots for exploration, digestible robots for medical purposes in humans and animals, and food transportation where the robot does not require additional payload because the robot is the food.
The team constructed dozens of muscles using materials ranging from metal springs to packing foam to sheets of plastic, and experimented with different skeleton shapes to create muscles that can contract down to 10 percent of their original size, lift a delicate flower off the ground, and twist into a coil, all simply by sucking the air out of them.
MIT CSAILとハーバード大学のWyss Instituteの研究者は、折り紙からインスピレーションを受けた、折り畳み式の人工筋肉を開発したそうです。